| การสร้าง map / สนาม / ภารกิจด้วยตัวเอง | |||
| ในบทนี้จะกล่าวถึงวิธีการสร้าง map / สนาม / ภารกิจด้วยตัวเอง จากโปรแกรมวาดรูปทั่วไป ตัวอย่างนี้จะยกตัวอย่างการสร้างสนามจากโปรแกรม Microsoft Paint มาเริ่มกันเลยนะครับ | |||
| 1. เปิดโปรแกรม Microsoft Paint ขึ้นมาจากนั้นกำหนดความกว้างความสูงตามต้องการ โดยเลือกเมนู Paint -> Properties ดังรูปด้านล่างนี้ | |||
 | |||
ในตัวอย่างนี้จะขอกำหนดความกว้าง 800 pixels ความสูง 500 pixels | |||
 | |||
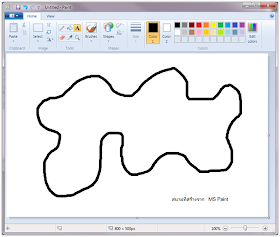
เลือกดินสอ Pencil -> Brushes แบบที่ 1 -> Size เลือกขนาดความหนาที่ต้องการ -> เลือกสีดำ (สำหรับสร้างเส้นสีดำ) | |||
 | |||
ลงมือวาดสนามตามแต่จินตนาการ | |||
 | |||
ต่อไปเป็นขั้นตอนการบันทึก เลือกคำสั่ง Save as -> PNG picture | |||
 | |||
ตั้งชื่อสนามที่ต้องการแล้วคลิกที่ปุ่ม Save | |||
 | |||
กลับมาที่โปรแกรม c/c++ robot simulator เลือกคำสั่ง Load map as... | |||
 | |||
เลือก map ที่สร้างแล้วคลิกปุ่ม Open | |||
 | |||
จากได้ดังรูปด้านล่าง แล้วทำการหยับ จับ วาง หุ่นยนต์ วัตถุ ได้ตามต้องการ | |||
 | |||
ต่อไปทำการบันทึกการจัดวางตำแหน่งของหุ่นยนต์ จากเมนู Save Position in map ... | |||
 | |||
การตั้งชื่อให้ตั้งชื่อเดียวกันกับชื่อของสนามนั้น ๆ และเติม .pos ลงไปด้วย เช่น map01.pos คลิกปุ่ม Save | |||
 | |||
| การนำไปกับเครื่องอื่น ๆ ให้ทำการ copy ทั้งโฟล์เดอร์ไป ซึ่งในนั้นจะประกอบด้วย ไฟล์รูปภาพ .png และไฟล์เก็บตำแหน่งของวัตถุในสนาม .pos | |||
ผมมี หุ่นpopxt ครับ ผมลองเขียนผนวก libery #include ใส่ลงไปในโปรเเกรม Robot Simulator
ตอบลบเเล้ว มัน compile ไม่ผ่านครับผม เเล้ว full vision จะมี bobxt ไหมครับ ช่วยตอบที ครับขอบคุณครับ
ไม่ต้องเขียนผนวก library #include ในโปรแกรม c robot simฯ ครับ แต่หุ่นยนต์จริง ๆ ต้อง #include เสมอ
ตอบลบดูรายละเอียดคำสั่งในเมนู library & function -> http://krumonrobot.blogspot.com/2013/01/library-function.html
คำสั่งที่ใช้ได้โปรแกรม c robot simฯ มีเท่าที่เขียนไว้ใน library & function ครับ
พอจะยกตัวอย่างคำัสั่งที่เรียกใช้ไม่ได้ จาก popxt ให้ดูหน่อยได้ไหมครับ
ตอบลบเผื่อจะมีวิธีแก้ปัญหา และก็อย่าลืมว่านี่คือตัวจำลองนะครับ ไม่ใช่ฮาร์ดแวร์จริง ฉะนั้นบางคำสั่งไม่สามารถใช้งานได้ และจุดประสงค์หลัก ๆ ของโปรแกรมคือเน้นการเขียนซี ไม่ลงลึกถึงฮาร์ดแวร์อื่น ๆ ครับ
เมพขิงๆครับ ขอบคุณมากๆครับ
ตอบลบสวัสดีครับ ผมอาจารย์ชาญชัย จากมหาลัยศรีปทุม เห็นแล้วเยี่ยมมากครับ ผมจะไปขอความรู้และความร่วมมือภายหลัง เพราะช่วงนี้ผมงานยุ่งมากครับ
ตอบลบผศ.ชาญชัย
ศูนย์นวัตกรรมสมองกลฝังตัวศรีปทุม